Roboter gibt es schon seit vielen Jahren als Kinderspielzeug. Sie sind aus Pappe, Holz, Blech oder Plastik und schauen oft lustig aus.
Aber ihre Fähigkeiten sind meistens gering. Und vor allem können nur die wenigsten irgendetwas Neues lernen.

Auf der anderen Seite gibt es Roboter in der Industrie, die können bestimmte Dinge sehr gut, wie z.B. etwas montieren oder zusammenschweißen. Aber sie sehen nicht aus wie Menschen.
Dieser hier besteht nur aus einem Arm:

Dem kann man ganz genau beibringen, wie er die Teile einer Autokarosserie zusammenschweißen soll. Und wenn ein neues Automodell produziert werden soll, muss man ihn nicht umbauen, sondern nur neu “anlernen”. Mehr lesen ..
Auch in der Landwirtschaft gibt es seit einigen Jahren große Fahrzeuge, die autonom das Feld bestellen oder ernten.
Hier ist ein Prototyp für den Gartenbau ..
Und dann gib es noch die Roboter zuhause. Als Staubsauger oder zum Rasenmähen, als fahrende Überwachungskamera, zur Reinigung des Swimmingpools.

Kinderlieder über Roboter
Wir sind die Roboter,
wir rattern und wir stottern,
wir trinken Benzin
und essen Batterien.
Wenn du uns ölst,
dann sind wir lieb.
Unsre Antennen machen
piep, piep, piep!
Wir fliegen mit Raketen,
die baun wir uns aus Knete.
Wir nagen euer Holzspielzeug,
ein Nagel hätt uns mehr gefreut
Robote te te te te te ter
Wir sind die Roboter,
ein blauer und ein roter.
Wir müssen niemals schlafe
und können alle Sprachen
Wir wissen fast alles,
die Flugbahn des Falles.
Wir rechnen die Wurzel aus zehn
und müssen nie zur Schule gehn!
( … am Ende singen die Roboter selbst
das Lied mit verzerrter Stimme .. )
Welchen Eindruck von Robotern vermittelt uns dieses Lied?
künstlich klingende Musik, stampfender Rhythmus (monotone Arbeit von Robotern),
Mehrzahl: Roboter treten als Gruppe auf, manchmal sogar als “Armee” ..)
Technische Unzulänglichkeit: Rattern und stottern, versehentliche Wiederholung von Sprache oder Bewegung
Antriebsenergie Kraftstoff oder Strom
Sie brauchen Pfleger (ölen), können böse sein oder lieb.
Fernsteuerung über Funk (Antennen)
gewaltige Kraft, können fliegen (Rakete)
oder Kinderspielzeug (Knete)
Roboteteteter (Fehlfunktion)
24 Stunden einsatzbereit (niemals schlafen)
allwissend (können alle Sprachen)
können wunderbar rechnen
müssen (können?) nicht lernen (gehen nicht in die Schule)
Kraftwerk
vor 50 Jahren gab es eine Musikgruppe “Kraftwerk”, die einen Hit hatten: “Wir sind die Roboter”. Später hat man Videos dazu gemacht
Jetzt sind wir voller EnergieWir sind die Roboter
Ja tvoi sluga (=I’m your slave)
Ja tvoi Rabotnik robotnik (=I’m your worker)
Wir funktionieren automatik
Jetzt wollen wir tanzen mechanik
Wir sind die Roboter
Wir sind auf Alles programmiert
Und was du willst wird ausgeführt
(ab 00:30) synthetischer Klang (damals war der Synthesizer gerade erfunden worden)
verzerrte Sprache
eckige Bewegungen
falscher Satzbau, falsche Betonung beim Sprechen, “Mekaniiik”
die akustische Monotonie steht im Gegensatz zu “jetzt sind wir voller Energie”, Hinweis auf die tschechische Herkunft des Worts Roboter (Robotnik)
Hinweis auf “Programmierung”
Musik machen
Industrieroboter werden manchmal aus Spaß dazu gebracht, spielerisch Dinge zu tun, hier z.B. Klavier zu spielen
Dystopien
Immer wieder haben Menschen Angst, dass Roboter durch Fehlprogrammierung Böses tun oder dass sie einen Willen entwickeln, der Dinge zerstört oder sich vielleicht sogar gegen Menschen richten könnte.
Zusammenfassung, Definition
Roboter sind stationäre oder mobile Maschinen, die programmgesteuerte Aktionen ausführen können.
Sie haben SENSOREN zur Wahrnehmung und AKTOREN, um etwas zu tun.
Man kann ihr Verhalten ändern, indem man sie umprogrammiert.
Manche dienen als Spielzeug, viele arbeiten aber in Fertigungsanlagen in der Industrie.
Manche sehen aus wie Menschen (“humanoide” Roboter) oder Tiere. Andere haben eine Form, die ganz für einen bestimmten Zweck entworfen ist.
AUFGABEN:
- Suche Im Internet Bilder von Robotern, die wie Hunde aussehen.
- Suche Bilder eines Roboters zur Kanalreinigung.
- Suche Bilder von humanoiden Robotern, die laufen und springen können. Wenn du ein wenig Zeit hast, schau dir das folgende Video an. Es ist keine Fälschung, sondern diese Roboter gibt es wirklich!
- Suche Bilder von Industrierobotern
- Es gibt Roboter, die wie Polizeihunde eingesetzt werden
- Tauchroboter
- Oder sogar in Altenheimen ..

Zum Nachdenken
FRAGE:
Ist jedes technische Gerät ein Roboter? Vergleiche einen klassischen Rasenmäher und einen Rasen-Mähroboter. Worin liegt der Unterschied? Ist es bei Staubsaugern genauso?
Und eine Waschmaschine? Es gibt Waschmaschinen, die einfach stur eine bestimmte Schrittfolge ausführen (Programmschaltwerk), aber es gibt auch welche, die ihr Verhalten an den Verschmutzungsgrad der Wäsche anpassen. Sie erkennen mit einem Lichtsensor die Trübung des Wassers.
Warum ist ein Handy kein Roboter?
Warum ist ein Fotokamera kein Roboter?
Ist eine Drehorgel ein Roboter? Oder eine Musikbox?
Könnte man eine Überwachungskamera als Roboter bezeichnen?
Ist eine Drohne ein Roboter?
Und wie sieht es mit einem ferngesteuerten Spielzeugauto aus?
Denke über folgende Begriffe nach:
- Geschwindigkeit, Stärke, Ausdauer, Genauigkeit, Robustheit, Empfindlichkeit, Behutsamkeit
- sortieren, stapeln, schieben, heben, drehen
- kleben, nieten, schweißen, fräsen, lackieren, verschrauben
- Sprache verstehen, sprechen, Mimik, Gestik
- schwimmen, tauchen, fahren, gehen, fliegen
- agieren, reagieren, planen, kontrollieren
ZUSAMMENARBEIT vom Menschen und ROBOTERN ?
SENSOREN
- Schall: Mikrofon, Spracherkennung
- Druck, Gewicht, Luftdruck
- Schalter: Taster, Knöpfe. Kippschalter
- Strom/Spannungssensoren
- Abstand, Bewegung: Ultraschall, Radar
- Temperatur
- Feuchtigkeit, Regen, Füllstand, Durchfluss
- Radioaktivität
- Gase (Stadtgas, Kohlenmonoxid, ..), Rauch, Alkohol,
- Geo-Position
- Lagesensoren, Winkel, Beschleunigung, Vibration
- Biometrie (Fingerabdruck, Iris, Blutdruck Herzschlag, Insulin, Hautwiderstand, ..)
- Funkempfänger
- Infrarot-Empfänger
- Helligkeitssensor, Farbsensor
- Kamera, Bilderkennung, Gesichtserkennung, OCR, QR-COde, Bar-Code
AKTOREN
- Lampen
- Display
- Arm, Greifer, Bein,
- Motor, Schrittmotor, Servo
- Linear-Aktor
- Relais
- Lautsprecher, Sprachsynthese
- Funksender
- IR-Sender
Begriff – Abgrenzung
Ferngesteuerte Apparate (Autos, Modellflugzeuge, Manipulatoren im Labor) sind keine Roboter, weil ihnen die Autonomie fehlt.
Programmgesteuerte Automaten (Spieluhr, Waschmaschine) sind keine Roboter, weil sie eines oder wenige unveränderliche Programme eingebaut haben´. Ihre Sensoren und Regelfunktionen sind sehr einfach (Wasserfüllstand, Waschtemperatur). Man könne Geschirrspüler oder Waschmaschinen vielleicht als Roboter bezeichnen, wenn sie den Verschmutzungsgrad des Geschirrs oder der Wäsche messen und ihr Verhalten daran anpassen. Auch das Küchengerät “Thermomix” hat variable Rezepte und einige Sensoren. Eigentlich verbindet man mit dem Begriff des Roboters aber eine gut sichtbare Bewegung des ganzen Geräts oder zumindest großer Teile.
Ein Handy ist kein Roboter, weil ihm die Aktoren fehlen, es kann sich kaum bewegen (höchstens, wenn es vibrierend auf dem Tisch liegt aber das ist keine zielgerichtete Bewegung).
Roboter-Sprache
Heute haben Roboter (oder Computer im Allgemeinen) eine sehr natürlich klingende Aussprache. Du kannst es mit dem Handy oder mit Alexa ausprobieren.
Es gibt Webseiten, die die menschliche Stimme absichtlich verzerren, z.B. https://voicechanger.io/
Oft kann man auch eine “Robotersprache” auswählen. Probiert es aus! Ihr könnt einen eigenen Text sprechen und dann viele Varianten anhören.
Ozobot Evo
- Ozobot: kaufen (ca. 220€), aufladen, Android App installieren, Firmware Update durchführen
- Ausprobieren, ob man ihn mit der App fernsteuern kann.
- Whiteboard (90x60cm) kaufen, die Haken mit einer Zange entfernen, 4 Gummifüße auf die Rückseite kleben, Beschriftung: OZOBOT Spielfläche auf der Rückseite anbringe, Ablageblech entfernen, Verpackung evtl. aufheben,
- Tempotaschentücher dazu legen zum Abwischen, evtl. auch eine kleine Sprühflasche Fensterreiniger
- den schwarzen Punkt (Kalibrierungsfläche) aus der Anleitung ausschneiden und in eine Ecke der Spielfläche auf der Vorderseite kleben
- Puzzle-Set kaufe, 96 Teile, 5,5 cm Kantenlänge, 6 gerade Teile überkleben mit den Codes für Springen (je zweimal links, rechts, geradeaus)
- eventuell: eigene Puzzleteile anfertigen (5,5 cm Kantenraster) mit freieren Formen, 3mm weißes MDF, Magnetfolie (1,2 mm, 3×3 cm) zuschneiden und auf die Rückseite kleben, Fahrspuren und Codes aufkleben oder aufmalen
- Tablet oder Laptop mit OzoBot App und mit ozoBlockly Programmierumgebung bereitstellen, Internetverbindung ist nötig
- Beamer für das Projizieren der erstellten Programme und zur Suche nach Anregungen für Ozobot Programme
- Namenskarten je Schüler (dünner Karton)
- Faltkarten als Hindernisse (dünner Karton)
1. Aufgabe
Ozobot auf dem schwarzen runden Fleck kalibrieren.
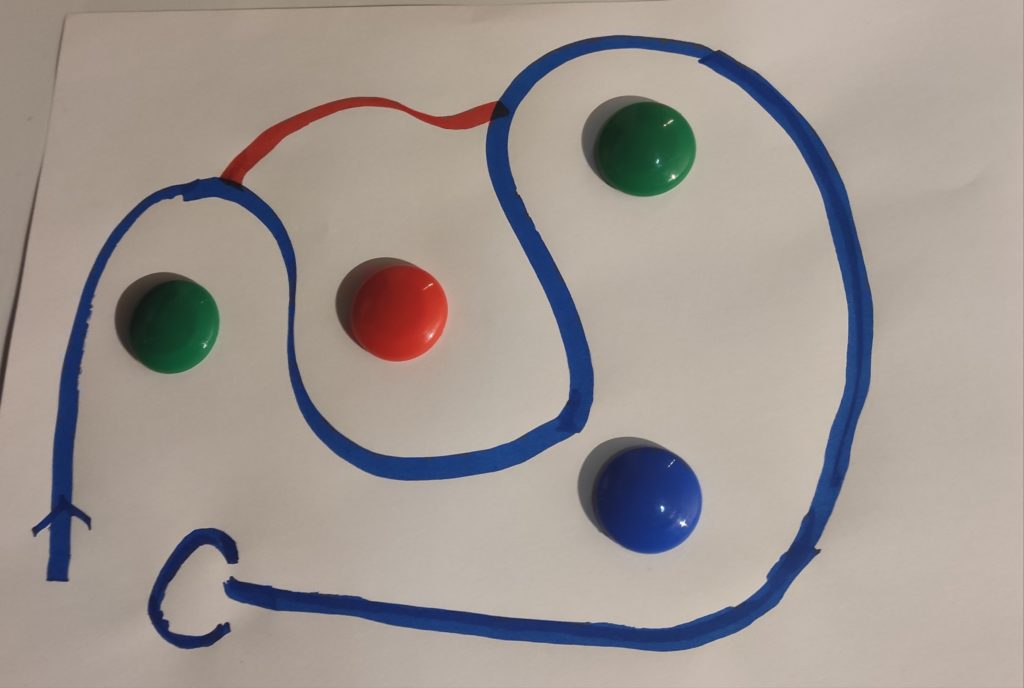
Zeichne eine Linie mit Kurven auf ein Blatt Papier. Gerne auch aus mehreren Abschnitten in unterschiedlichen Farben.
Starte die OZO App, verbinde dich mit dem Roboter und übe, mit der Fernsteuerung (“DRIVE”) umzugehen.
Steuere OZO zum Anfangspunkt deiner Linie und lass ihn dann ungefähr entlang der Linie bis zum Endpunkt fahren. Gar nicht so einfach, oder?
Achtung: Wenn Ozo gerade auf dich zu fährt, muss du ihn nach links drehen, wenn er nach rechts fahren soll. Denk dich immer in die aktuelle Fahrtrichtung hinein!
Entscheide, ob du die rote Abkürzung nimmst oder den blauen Weg entlang fährst.
Aufgabe 2
Schließe die App oder schalte OZO aus und wieder ein. Jetzt befindet er sich im “Linien-Verfolgen-Modus”. Setze ihn auf die blaue Linie und beobachte, was passiert.
Wiederhole das mehrmals.
Was beobachtest du? Welche Farbe zeigt OZO? Fährt er immer auf demselben Weg? Bleibt er am Ziel stehen?
Fährt er eleganter als du es selber mit der Fernsteuerung hinbekommen hast?
Farbcodes
Aufgabe 3
Füge ziemlich am Anfang der Linie eine Code ein, damit OZO schneller fährt.
Achtung: Du darfst nicht Farben übereinander malen. Füge den Code VOR dem Beginn deiner Linie ein oder zeichne das ganze Bild neu!
Kann OZO auch bei hohem Tempo noch der Linie folgen? Könntest du es mit der manuellen Fernsteuerung?
Aufgabe 4
Was müssen wir tun, damit OZO immer die rote Abkürzung nimmt?
Aufgabe 5 – Töne spielen
Es gibt Farbcodes, die den Ozobot dazu bringen, Töne abzuspielen und sich zu drehen. Suche sie heraus und baue sie in eine Strecke ein.
Aufgabe 6 – Count Down
Lass Ozobot rückwärts von 10 bis 0 im Sekundentakt zählen! (Mit Blockly)
Aufgabe 7 – eigene Töne spielen
Wir benutzen Blockly. Wir wollen die Töne eines Schulgongs erzeugen “d – a – f# – D”. Es gibt einen Befehl, der einen einzelnen Ton für eine bestimmte Dauer abspielt. Wir montieren mehrere Befehle hintereinander. Der letzte Ton klingt doppelt so lang wie die anderen. Wir packen die Befehlsfolge in eine Funktion und rufen sie zweimal auf. dazwischen soll eine kurze Pause sein.
Dann fügen wir noch einen Befehl zum fahren oder drehen hinzu.
Eine ACHT fahren
Wir haben einen Linienplan, der aus zwei Quadraten besteht, die an einer Seite verbunden sind. Ozo soll zweimal eine Acht fahren. Das Problem ist, dass er nach der gemeinsamen Strecke abwechselnd einmal nach links und das nächste Mal nach rechts fahren muss.
WEITERE AUFGABEN
https://www.noemedia.at/fileadmin/user_upload/Zentrale/Robotik/RoboterKoffer_20210929.pdf
Selbstbau-Projekt
Für den Tag der offenen Tür. Wir bauen das Ganze auf einer Sperrholzplatte auf. Es gibt einen Stadtplan und mehrere Gebäude, z.B. Theater, Schule, Bäckerei, Sportstadion.
Wir benutzen Sound-Speicher-Wiedergabe-Module, die wir über einen kleinen Arduino ansteuern. Zu jedem Sound-Modul gehört ein Näherungssensor. Wenn Ozo ihn erreicht, merkt das der Arduino und löst das Abspielen des Sounds aus. Über das Poti auf der Sensorplatine kann man den Abstand einstellen, bei dem der Sensor anspricht.